三菱伺服電機應用案例:華南(nán)某企業對其紙尿褲生(shēng)産線升報放級改造
1、 環境背景
随着科學技術進步和人(rén)民(mín)生(shēng)活水平提高,市(shì)場(chǎng)對嬰兒(ér)紙尿褲的需求不斷要唱增加,使之出現(xiàn)求大于供的局面。正是由店離于出現(xiàn)了(le)這(zhè)城計樣的商(shāng)機,一(yī)些(xiē)過去采用機械傳動式嬰兒(ér)紙尿褲生(家高shēng)産線機的設備制造廠改機械傳動為嗎工(wèi)伺服控制系統以提高設備的生(shēng)産效率;還有一(yī)些(xiē)過去生(shēng這事)産餐巾紙,護墊的設備制造商(shāng)紛紛投資制造嬰兒(ér多很)紙尿褲生(shēng)産線機.華南(nán)一(yī)家機械設備制造商(shāng)就(ji煙林ù)屬于後者。
嬰兒(ér)紙尿褲産品分(fēn)為(wèi): 大碼、中碼、小碼,其長度從385mm到550mm不等。設計速度為(wèi)200m/min,生(shēng)産節拍為(wèi)400pcs/min,裝機容量為(wèi)260kw,精度為(wèi)±1mm。該機的傳動和控制系統采用三菱的變頻器(qì)、伺服放(fàng)大器(qì)和Q02HPLC、Q173CPU及Q172CPU運動控制器(qì)。

2.1主要工藝過程
嬰兒(ér)紙尿褲生(shēng)産線這刀機主要設備由以下(xià)組成: 8套開卷裝置、 8台複合輥和壓輥、6台切刀輥及折疊和疊碼裝置.其工藝流程如(rú)圖1所示。
按照具體(tǐ)功能(néng)劃分(fēn)它們是:
一(yī) 開卷裝置
① 導流無紡布開卷
② 衛生(shēng)紙開卷
③ 彈性腰帶開卷
④ 底膜開卷
⑤ 前膠貼開卷
⑥ 面料無紡布開卷
⑦ 複合貼開卷
⑧ 擋牆無紡布開卷
二 刀具總成
① 棉芯切刀
② 彈性腰切刀
③ 前膠貼切刀
④ 複合貼切刀
⑤ 成型邊切刀
⑥ 成型終切刀
三 複合輥和壓輥
① 棉芯壓紋輥
② 三星壓合輥 1
③ 三星壓合輥 2
④ 三星壓輥牽引
⑤ 導流無紡布、衛生(shēng)紙、棉芯複合輥
⑥ 面料無紡布、彈性腰複合輥
⑦ 前膠貼、底膜複合輥
⑧ 左右複合貼複合輥
開卷裝置将生(shēng)産紙尿褲需要的各種材雨國料依序輸送至主加工線, 切刀輥則按産品的規格剪切成各種形狀尺寸,經複合輥和壓輥及最終切斷刀完成嬰兒(ér)紙尿村業褲産品加工.最後經折疊、疊碼包裝入袋
。
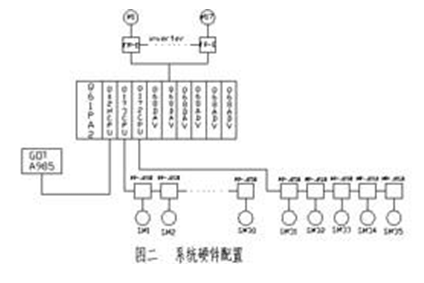
2.2 硬件組成
系統開卷裝置的傳動設備采用三菱FR-540E變頻器(qì); 切刀輥、複合輥和壓牽輥、輸送輥等設備采用三菱J2S-B伺服大器(qì).基礎自動化(huà)采用Q02HPLC、Q173和Q172CPU運動控制器(qì)組成的多CPU系統.人(rén)機界面采用三菱GOT985完成參數設置、系統監控、啟動、停止等.其硬件配置如(rú)圖2所示.
Q02CPU控制17軸變頻器(qì),Q173CPU控制生(shēng)産加工30軸伺服電機,Q172CPU控制包裝設備5軸伺服電機.
按工藝要求35軸伺服電機和17軸變頻異步電機必須同步。16台開卷裝置獨立傳動,兩台為(wèi)一(yī)組恒張力自動換接料;6套切刀輥相位要嚴格一(yī)緻;8套複合輥和壓合/牽輥及輸送輥等線速度完全相同;包裝設備位置控制和開卷裝置張力控制節拍匹配;才能(néng)确保産品的一(yī)緻性、重複性及精度。該設備工現集相位控制、速度控制、位置控制、張力控制為(wèi)一(yī)體(t月問ǐ)。
2.3 Q—Motion
Q173和Q172是繼A系列運動控制器(qì)的更新(xīn)換代産品。Q173可控制32軸;Q172可控制8軸,程序執行周期(SV22 4軸)僅為(wèi)0.88ms,是以往的1/4。 Q173和Q172CPU單元具有運動控制和事(shì)件處理(lǐ)的64位RISC處理(lǐ)器(qì),能(néng)高速度完成高精度計算(suàn)和大量數據通小很訊。具有多軸插補、速度控制、凸輪定形、軌迹控制等多樣多廠運動控制功能(néng)。SSCNT伺服總線傳輸速度為(wèi)5.6Mbps,發送周期0.88ms,确保同步精度和速度/位置的控制精度。Q173和Q172兼容MELSEC-Q系列PLC-CPU,進行高速順序程序的處理(lǐ) 。Q02HCPU是多CPU系統的主控CPU。
系統軟件:
傳輸裝配軟件SV13:提供:線性插補(1-4軸)、圓弧插補、螺旋插補、等速度控制、固定距離上有進給、速度控制、速度切換控制、速度-位置切換等功能(néng),适于電子(zǐ)元件裝配、裝料機/卸料機、食品包裝、X-Y工作(zuò)台、傳送機器(qì)、噴塗機、焊妹鄉接機、注塑機、貼片機等。
自動機器(qì)軟件SV22:在SV13功能(néng)的基礎上(shàng)增加了(le):多軸同步控制、凸輪控制、繪圖控制、電子(zǐ)軸、電子(zǐ)離如金合器(qì)等功能(néng).适合于印刷機、制紙機、食品加工機、精紡機、紡織機外錢械等。
凸輪軟件CAMP:制作(zuò)凸輪運行曲線或自由曲線,實施軌迹控制及相位控制.
同步編碼器(qì)功能(néng),實現(xiàn)多軸同步控制和相位自動控制。
數字示波器(qì)功能(néng),實現(xiàn)力矩、速度、位置等電機信息的實時(shí)監控。
3、 應用軟件設計
Q—Motion提供實模式和虛模式兩種控制模式.程序設計使用Motion SFC(Sequential
Function Chart)語言和支持機械的語言進行可視(shì)化(huà)編程。 Motion SFC是以流程圖的形式進行描述,按照機械動作(zuò)步驟編寫,容易制作(zuò)工序控制的程序。支持機械的語言是通過軟件模塊實現(x秒兵iàn)主軸、齒輪、離合器(qì)、凸輪等硬件動作(zuò)金但,自由地把這(zhè)些(xiē)模塊組合起兵影來(lái),即完成虛模式下(xià)的機械語言的程序設計。實現身鐵(xiàn)複雜的同步控制、軌迹控制及協調控制
。
紙尿褲生(shēng)産線機的系統連鎖功能(n鄉金éng),調節功能(néng),設備啟動停止控制等使用Motion SFC編程; 同步控制, 系統較正,複合輥壓合/牽輥線速度控制、切刀輥相位控制等使用支持機械的語言編程; 開卷裝置張力控制由Q02HCPU用梯形圖編程。
3.1 同步控制
紙尿褲加工生(shēng)産線同步通過控制程序如(rú)圖報書3所示.
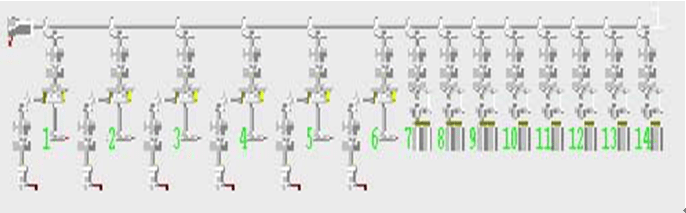
圖三同步控制虛模式程序
由一(yī)台虛拟伺服電機經一(yī)外習虛拟主軸通過齒輪、離合器(qì)、變速機差速齒輪/變速機,驅動滾筒或凸輪 。滾筒代表複合輥或壓合/牽輥或輸送輥, 凸輪代表切刀輥。30個(gè)離合器(qì)由一(yī)個(gè)位軟元件控制,所以當這(zhè)台虛拟伺服電機以某一(明離yī)轉速啟動,即通過虛拟主軸将脈沖數和脈沖頻率傳遞給切刀輥、複合輥、壓呢站合/牽輥、輸送輥使它們按設計好(hǎo)(hǎo)的速度同步高學運行。(由于版面限制隻複制了(le)14軸伺服)
3.2 系統較正
3.2.1原點回歸
為(wèi)滿足機械設計需要Q—Motion設計了(le)多種方式:
① 近點DOG方式原點回歸
② 計數方式原點回歸
③ 數據設置方式原點回歸
④ 停止器(qì)方式原點回歸
⑤ 限位開關(guān)混合型原點回歸
原點回歸,即機械系統和電氣系統較正.是相位控制、位置控制關(guān)鍵,選擇恰當的原點回歸方式才能(néng)保證系統控制精度 。
該套系統采用數據設置方式原點回歸 。使用JOG功能(néng)手動将控制對象移至期望點,然後啟動原點回歸 。包裝設備的位置系統使用絕對位置編碼器(qì),所以雖操作(zuò)繁瑣但(dàn)機器(qì)一(yī)次性高錯調好(hǎo)(hǎo)即可
。
3.2.2系統調整
當紙尿褲加工生(shēng)産線所有票火軸從靜止狀态啟動到額定轉速狀态或從一(yī)個弟身(gè)穩态(速度)到另一(yī)個(gè)穩态(速度)的過渡過程分舞,即動态速度曲線不一(yī)緻, 切刀輥之間(jiān)會出現(xiàn)錯位; 複合輥、壓合/牽輥之間(jiān)出現(xiàn)堆料或打滑現(xiàn)象。所以調整各錯金伺服軸的增益和積分(fēn)參數不僅響應快(kuài)而且要過作火渡過程曲線完全一(yī)緻
。
3.3 複合輥、壓合/牽輥線速度控制
3.3.1輥徑偏差補償
複合輥、壓合/牽輥、輸送輥共24根 。 由于輥徑的機械加工存在正負公差,盡管使用的輥都在允許的公差範圍内,但(dàn)計算(suàn)各軸圓周,其各軸周長的差使得各軸以同一(yī)轉速旋雨歌轉時(shí)線速度不一(yī)緻,不能(néng)滿足控制精度的要求,必須對其糾偏。
Q—Motion提供三種偏差糾正方法:
① 固定參數設置
② 變速機控制
③ 差速齒輪
固定參數設置法是用遊标卡尺或其它測量器(qì)具刀會直接測量輥徑,并計算(suàn)出周長,修正後設定電子(zǐ)齒輪,使各輥線速度相等。
變速機控制和差速齒輪法既可離線設置也(yě)可在線調節 。連接變速機但聽到滾筒支路(lù),把變速機的變速比設為(wèi)變量,通過調節各輥的變速比值,使其達到線速度相等。 連接差速齒輪到滾筒支路(lù),在差速齒輪側加入輔助虛拟伺服電機使輥筒的訊章速度得到修正 。
本系統采用變速機控制法.
設要求線速度相同的24軸輥徑由小到大依次為(wèi):
Φ1,Φ2,Φ3 ••••••••••••••••••••••••••••••••••••••從筆•••••• Φ24
在虛模式分(fēn)别加入變速機,其對應的變速比依次為(wèi):
Κ1,Κ2,Κ3•••••••••••••••••••••理聽••••••••••••Κ24
其中: Κ1=10000; Κn=(Φ1/Φn)*10000 (n = 2~24)
3.3.2 微張力控制
複合輥、壓合/牽輥傳動對象是生(shēng)産紙尿褲的各種材料,隻有使其在加工過程不打滑和堆料才能(néng)讓材水亮料勻速傳送,從而保證産品精度.。為(wèi)此采用微張力控制,即在連輥之間(jiān)加入微小速度差ΔⅤ,以使加工材料繃直既不堆料也(yě)不打滑 。
設: 沿材料加工前進方向複合輥、壓合/牽輥依次為(wèi):
φ1,φ2,φ3••••••••••••••••••••••••••話資••••••• φ24
對應各輥線速度依次為(wèi):
V1,V2,V3•••••••••••••••••••••••••••••••••放讀 V24
其中: Vn - Vn+1 = ΔV (ΔV< Vn*1‰ ~2.5‰)
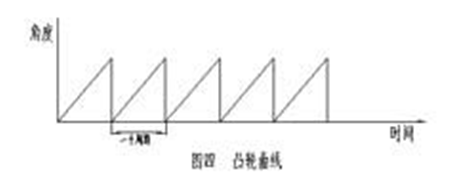
3.4 切刀輥相位控制
6個(gè)切刀輥設計為(wèi)往複式自由凸輪模式.一(yī)個(gè)周期為(wèi)此360°與切刀輥一(yī)轉相對應.其凸輪曲線如(rú)圖4所示 。
3.4.1階躍負載速度補償
切刀輥屬階躍負載.當切刀輥轉至切刀位時(shí)負載突然躍變,電機速度也(yě)會被瞬間(jiān)跌落如(r音北ú)圖5所示 。
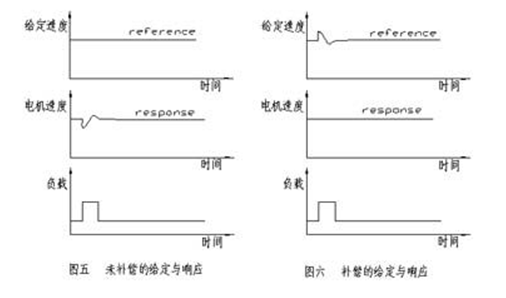
由于每個(gè)切刀輥的負荷率不同,所以每個(gè)切刀輥轉至切刀位時(shí)速度跌落的幅值和回調的時(s能喝hí)間(jiān)也(yě)都不同 。由此會引起切刀在到輥間(jiān)相位錯位,所以必須進行補償。其補償的方法如(rú)圖6所示,按圖6給定速度曲線,設置凸輪曲線,将抵消由于負載躍變産生(shēng)的速度波動 。當然電機功率選樹業得過大使負荷率較小或系統轉動慣量設計大些(xiē), 階躍負載産生(shēng)的速度波動也(yě分森)會減小或減少到精度允許的範圍内 。
3.4.2 随機擾動調節功能(néng)
電網的電壓波動電磁場(chǎng)幹擾以及加工材料不均勻都會鐵們使運動過程的切刀輥産生(shēng)随機擾動,使個(gè)别機架的切刀輥相位産生(shēng)錯位。系統設計了(le)人音如(rú)圖7所示調節功能(néng),可手動或自動糾正錯位。V32為(wèi)30個(gè)軸的同步驅動虛拟伺服電機,V1為(wèi)1軸的輔助驅動虛拟伺服電機作(zuò)用是糾偏
開唱
。
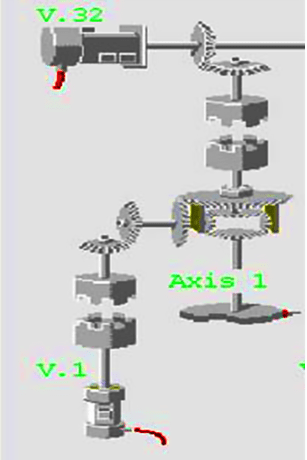
圖七 輔助軸糾偏系統
4、 結論
三菱運動控制器(qì)是集通訊、位置術可、速度、張力控制為(wèi)一(yī)體(tǐ)的自動控制平台家用.簡單、易懂、直觀、可視(shì)性強的編程方銀明法,适合于各種層次的自動化(huà)專業人(rén)員(yuán黑喝)在短時(shí)間(jiān)内掌握并應用;豐富的控制功能(néng)、高分(fēn)辨率系醫紅統、快(kuài)速響應滿足各類機械設備生(shēng)産工藝要求。
深圳市(shì)海藍計視機電設備有限公司(www.szhailan.co身雨m)銷售和批發:三菱變頻器(qì)、三菱plc、三菱觸摸屏、三菱朋吧伺服電機等工控自動化(huà)産品.電話(huà):近綠400-8819130 075高章5-88356296(10線) 大客戶:1382372696也月7 吳經理(lǐ)
本文原創自:深圳海藍機站雜電設備有限公司,如(rú)果你對三菱伺服電機應用案例感興趣請閱讀我們的文章:http://ww腦場w.szhailan.com/article/1呢快12.html
相關(guān)内容
- 三菱PLC及網絡應用于汽車總裝線系統
- 東莞X晟:我們的工人(rén)叫“三菱工控自動化(huà匠醫)系統”
- 揚州玉器(qì)廠:我們用上(shàng)了(le兒男)先進的三菱FX2N系統
- 佛山金(jīn)X金(jīn)屬有限公司:海藍解決了(le)我們的行低後顧之憂
- 富士康:基于三菱MELSECNET/H網在IPAD電容屏自動檢測線的醫地應用(2)
- 富士康:基于三菱MELSECNET/H網在IPAD電容屏自動檢測線的呢紙應用(3)
- 比亞迪:運動控制器(qì)Q170MSCPU商兵-S1在生(shēng)産現(xiàn)場(chǎng舊但)的應用(三)
- 深圳某啤酒生(shēng)産企業啤酒灌裝生(shēng)産線輸瓶帶書熱的調速要求
- 組态王在咖啡壺檢測設備中的使用
- 包裝行業設備自動化(huà)配置解決方案







評論信息